Electronique
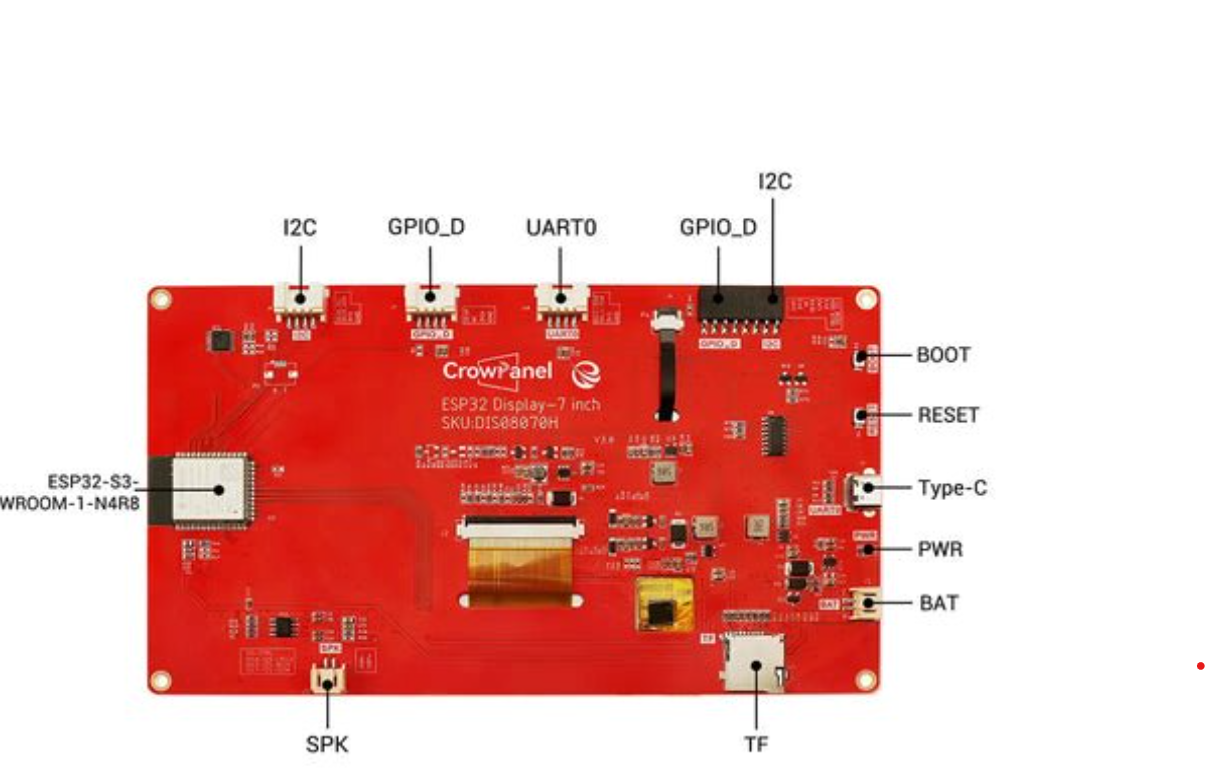
La partie électronique de notre projet a été relativement simple à mettre en place grâce à l’utilisation d’une carte électronique déjà très complète. En effet, nous avons opté pour un écran Elecrow équipé d’un ESP32, qui répondait parfaitement à l’ensemble de nos besoins pour le développement logiciel. Ce choix stratégique nous a permis de gagner un temps précieux et de nous concentrer davantage sur l’intégration des composants complémentaires nécessaires au bon fonctionnement de notre système.
Modèle sur OnShape – Vue globale
Choix des Modules Complémentaires
Après avoir validé notre support principal, nous avons recherché les modules nécessaires à notre application. Deux capteurs se sont révélés indispensables :
- Un module GPS NEO6M, pour la géolocalisation.
- Une boussole Grove 3 axes, pour la détection de l’orientation.
Le module GPS a été choisi après plusieurs recherches en ligne, tandis que la boussole Grove a été sélectionnée en raison de notre expérience préalable avec cette marque lors de travaux pratiques antérieurs.
Intégration des Composants
- La boussole a été connectée via le bus I²C, une interface simple et fiable pour ce type de capteur.
- Le GPS, quant à lui, devait être câblé sur l’interface UART0 du microcontrôleur.
Malheureusement, nous avons rencontré des problèmes techniques lors de l’intégration du GPS : dès que ce dernier était connecté, le microcontrôleur cessait de recevoir des données. Ce dysfonctionnement pourrait être lié à un conflit matériel ou une erreur de câblage que nous n’avons pas pu identifier à temps.
Problèmes lors de l’assemblage final
La veille de la Journée des Projets, en procédant à l’assemblage final dans le boîtier, nous avons constaté que la boussole ne fonctionnait plus correctement une fois intégrée. Après analyse, nous suspectons que des interférences électromagnétiques entre l’écran et la boussole — qui étaient collés l’un à l’autre — ont perturbé son fonctionnement.
