Premier Prototype Mécanique
1. Présentation Générale
Caractéristiques principales :
- 4 parties mécaniques principales
- 6 servomoteurs Dynamixel AX-12A
- Structure légère en aluminium/composite
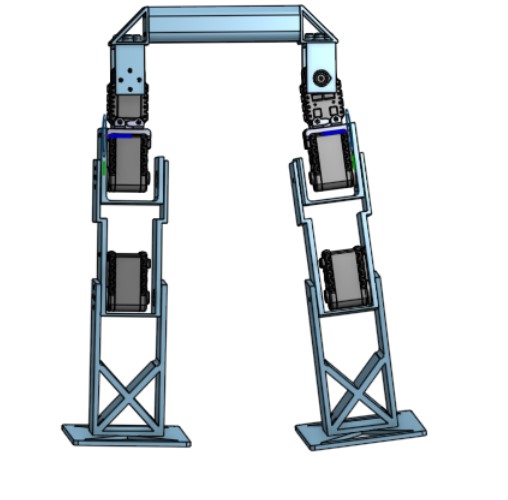
Premier prototype mécanique du robot bipède
2. Composition Mécanique
Structure Générale
| Composant | Description |
|---|---|
| Partie supérieure (bassin) | Support de la structure et fixation des jambes |
| Cuisse (x2) | Transmission mouvement hanche-genou |
| Tibia (x2) | Transmission mouvement genou-pied |
| Pied (x2) | Support au sol (fixe dans ce prototype) |
Détails des composants
Partie Supérieure (Bassin)

Structure centrale de fixation
- Rôle : Structure centrale de fixation
- Matériau : Aluminium/composite léger
- Composants : Fixation des 2 servomoteurs de hanche
Cuisse
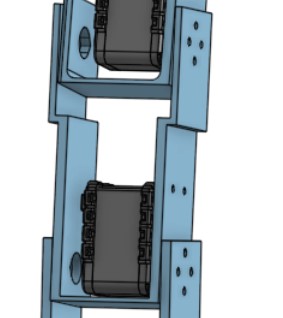
Segment cuisse avec servomoteur
- 1 servomoteur Dynamixel AX-12A par cuisse
- Liaison hanche-genou
3. Servomoteurs Dynamixel AX-12A
Spécifications techniques :
- Quantité totale : 6 unités
- Contrôle : Bus série TTL (Daisy-chain)
- Couple max : ~15 kg.cm (à 12V)
- Angle de rotation : 300°
Pour plus de détails, vous pouvez consulter le lien suivants : Servomoteurs Dynamixel
| Position | Quantité | Fonction |
|---|---|---|
| Hanche gauche | 1 | Rotation horizontale jambe gauche |
| Hanche droite | 1 | Rotation horizontale jambe droite |
| Genou gauche | 1 | Flexion/extension cuisse-tibia |
| Genou droit | 1 | Flexion/extension cuisse-tibia |
| Cheville gauche | 1 | Mouvement tibia-pied (optionnel) |
| Cheville droite | 1 | Mouvement tibia-pied (optionnel) |
4. Remarques Techniques
- Pas de système de stabilisation active (IMU/gyroscope) dans cette version
- Alimentation et contrôleur non visibles (documentation électronique séparée)
- Pieds à axe fixe pour simplifier l'équilibrage passif
- Prototype conçu pour validation mécanique de base