Architecture Matérielle
Conception mécanique en 3 phases
Phase 1 : Prototype initial
Composition :
- Liaison bassin entre les deux jambes
- 8 servomoteurs
- Hanche
- Cuisse
- Tibia
- Pied
Difficultés rencontrées :
- Frottements importants entre les pièces imprimées en 3D
- Jeu mécanique insuffisant pour assurer la fluidité des mouvements
Phase 2 : Solution Robot Araignée
Réutilisation du châssis du robot araignée de l'association Unimakers d'Unilasalle Amiens :
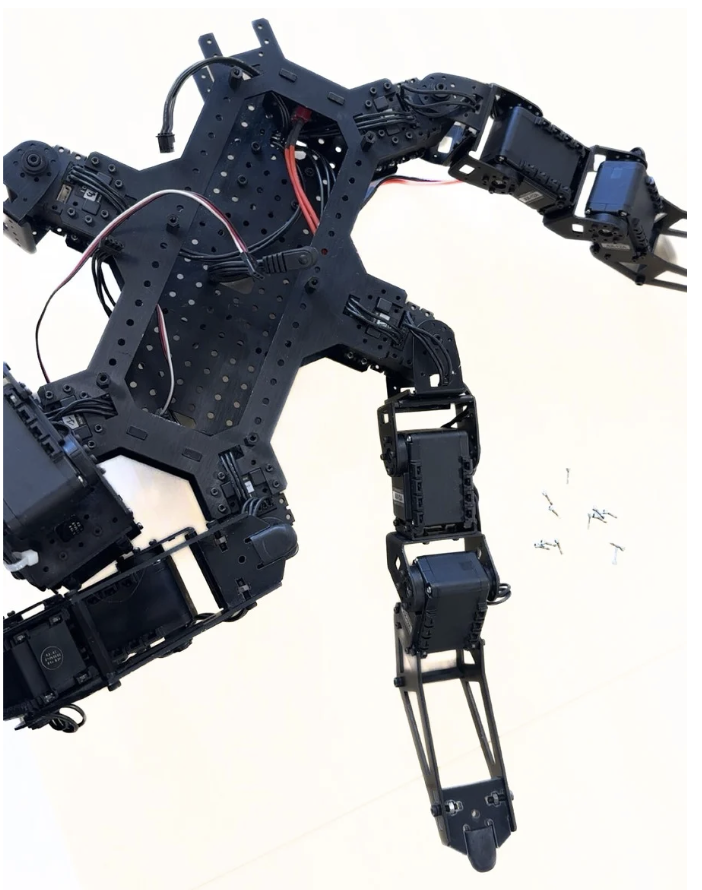
Robot Araignée Unimakers
Avantages :
- Structure métallique robuste (6 pattes avec 3 servomoteurs chacune)
- Support idéal pour l'électronique embarquée
- Réutilisation de 2 pattes pour notre projet bipède
- Supports métalliques démontables offrant :
- Meilleure rigidité structurelle
- Précision articulaire accrue
- Maintenance facilitée
Phase 3 : Modèle Final
Conception 3D sous Onshape :
- Châssis central : Structure de cohésion avec surface plane pour l'électronique
- 2 pieds optimisés pour la stabilité
Architecture des jambes :
- Hanche : Rotation latérale
- Genou : Flexion/extension dans le plan sagittal
- Cheville : Adaptation de l'angle du pied
- Assemblage : Vis M2 et M3 pour l'interconnexion des segments
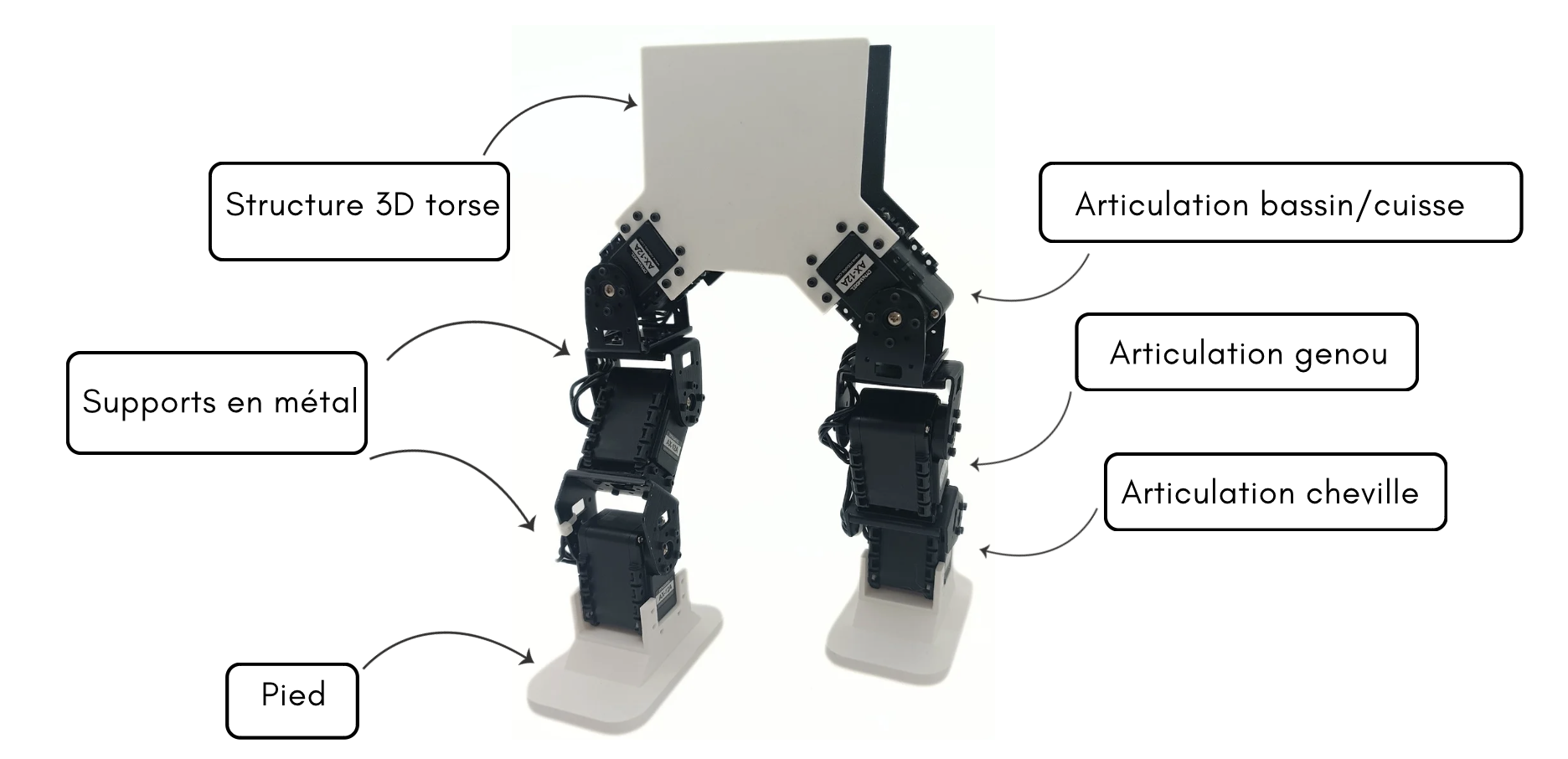
Architecture articulaire du robot bipède