Servomoteur MG996R
Notre premier servo moteur est une servo standart qui qui à une rotation de 180°. Il est utlisé pour la direction de la roue avant du char à voile et il est commandé par l’ESP32.

Caractéristique du servomoteur
Fabricant : Tower Pro
Type : Servo moteur standard
Modèle : MG996R
Angle de rotation : 180° (±90°)
Vitesse de rotation : 0.17 s/60° à 4.8 V
Couple : 9.4 kg-cm (130.5 oz-in) à 4.8 V
Photo du servo moteur.
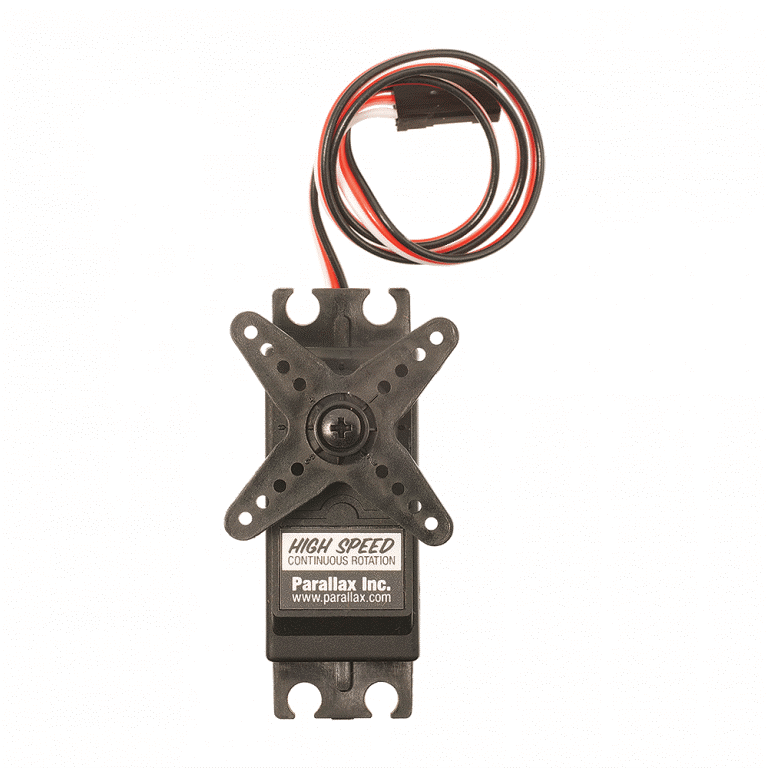
Servomoteur Parallax INC rotation continue HighSpeed
Le second servomoteur est utilisé pour tendre et détendre la voile c’est un servomoteur à rotation continue.
Caractéristique du servomoteur.
Fabricant : Parallax Inc.
Type : Servo moteur à rotation continue
Vitesse de rotation : 0.12 s/60° à 6 V
Couple : 1.6 kg-cm à 6 V
Plage de tension : 4.8 V à 6 V
Courant de fonctionnement : ~140 mA (sans charge), ~900 mA (à couple maximal)
Dimensions : 40.6 x 20.3 x 36.6 mm
Poids : 47 g
Photo du servo moteur.
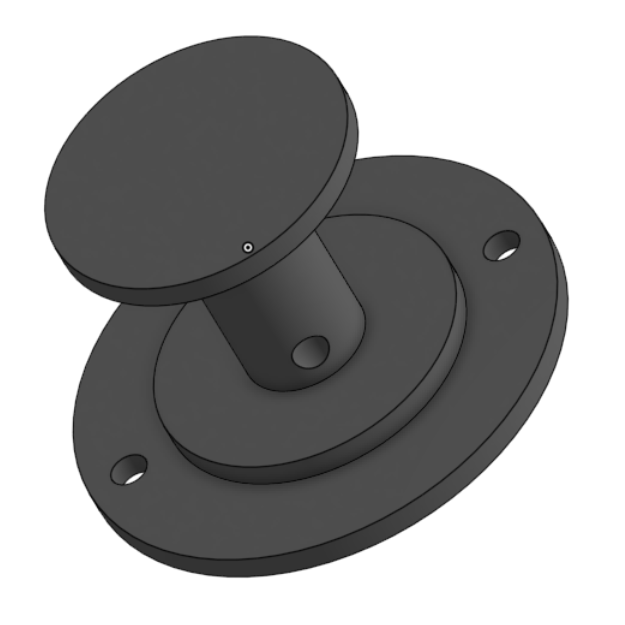
Enrouleur :
La corde viens s’enrouler autour de cette pièce avec un oeillet placé en amont afin de faciliter le bon fonctionnement du système.
Utilisation des Servomoteurs
Dans un premier temps j’ai utilisé WOKWI pour coder les servos moteurs avec des boutons push-pull ensuite je l’ai retranscrit sur Virtual Code Studio et je l’ai adapté pour qu’il fonctionne avec l’application BLYNK qui fait office de télécommande.