Conception et prototypage
Supports moteurs
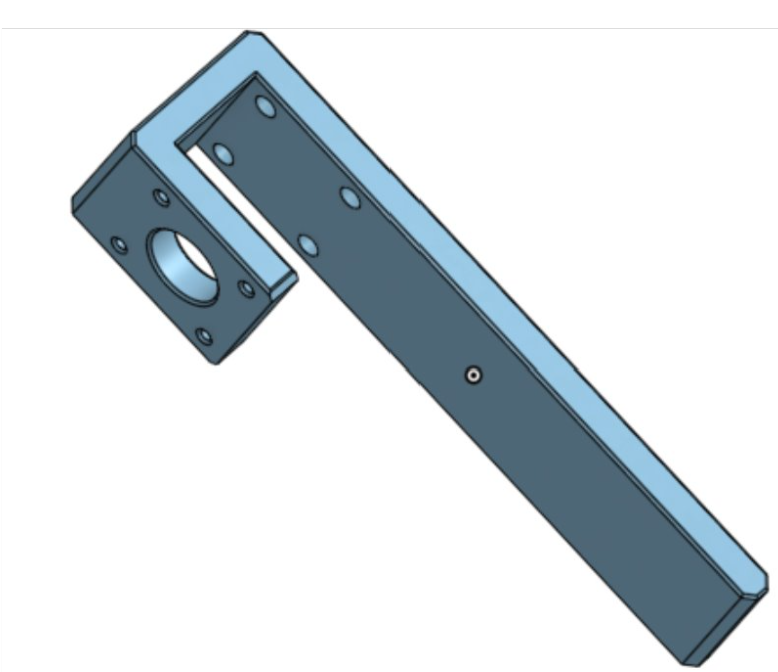
Le principe de ce support est de maintenir les moteurs aux deux extrémités en haut du tableau. Afin de ne pas abimer le tableau, nous avons pris soin d’éviter l’utilisation de vis.
C’est un support que nous clipserons sur les deux coins du tableau blanc.
Il est important de souligner que les supports utilisés pour le tableau sont spécifiques et uniques à ce dernier.
Cela représente un inconvénient pour d’autres projets, car chaque nouvelle application du drawbot nécessitera la création et conception de nouveaux supports sur mesure de supports adaptés aux conditions et spécificités de l’endroit où il sera utilisé, ce qui peut limiter la flexibilité du projet.
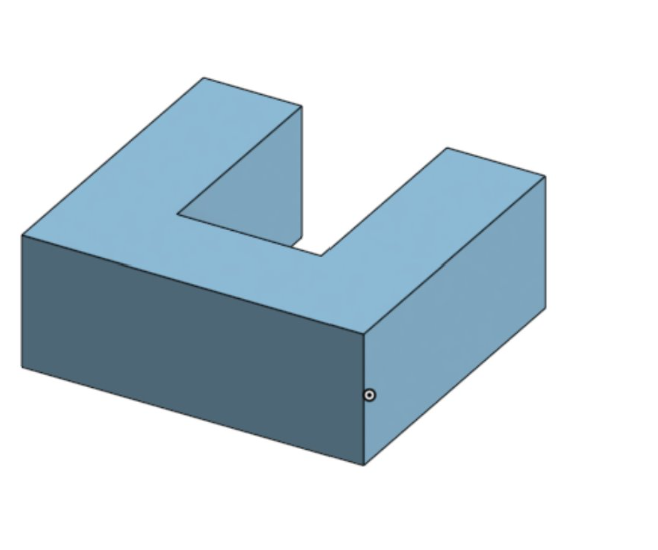
Supports Poids - moteurs
Modélisation d’un support relié à nos moteurs.
Ce support a pour but d’apporter du poids à notre robot et stabiliser ses mouvements.
Avec ce poids ajouté de chaque côté du tableau, notre robot aura la précision nécessaire pour être le plus fonctionnel possible.
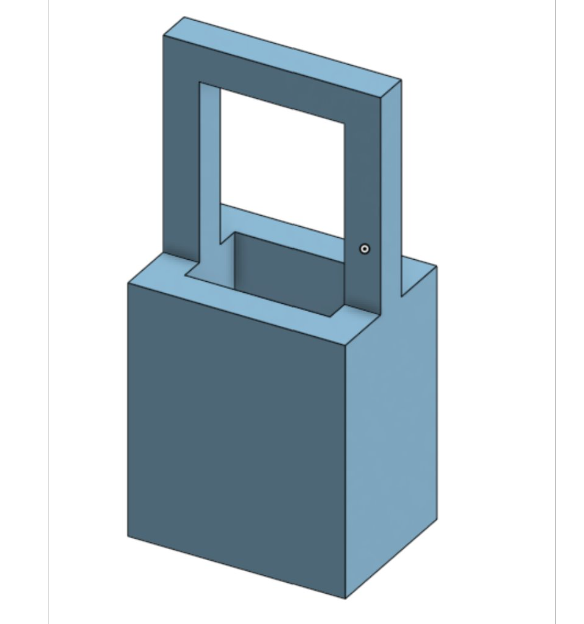
Supports stylo - robot
Support central comprenant le servo moteur, les courroies et le stylo :
Place disponible pour y placer le servo moteur et passer ses câbles.
Fixation du stylo dans un cercle spécifique, avec un système de vis pour le maintenir en place. Cela permet d’assurer une précision optimale lors de l’écriture.
Accroches disponibles pour les courroies.
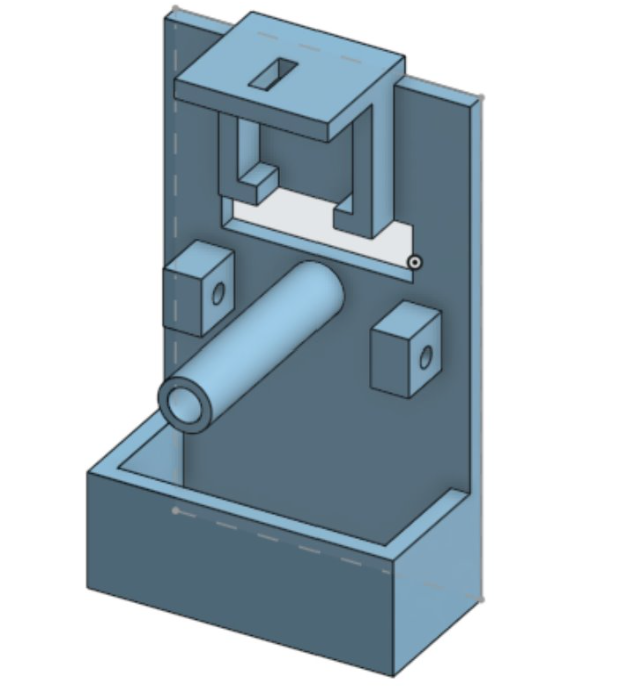
Le stylo doit pouvoir avancer et reculer afin d’écrire ou non lorsque le drawbot se déplace.
Pour ce faire, nous avons conçu un mécanisme de pousser du support à l’aide d’une extension du palonnier pour notre servo moteur.
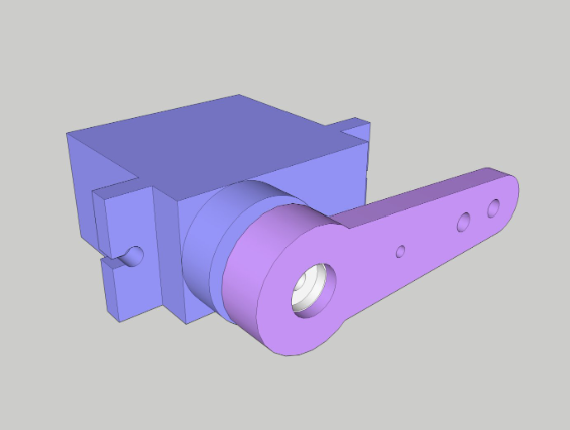
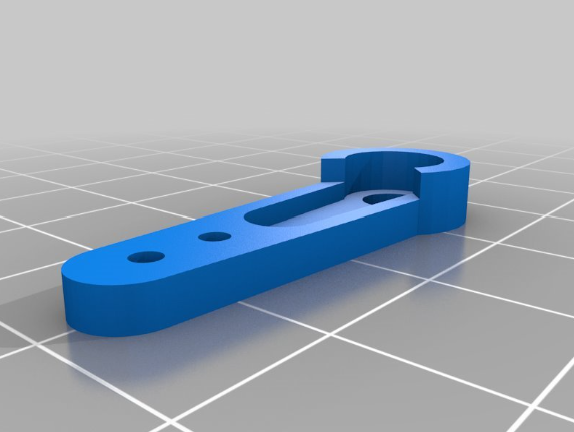
Le stylo dessine uniquement lorsque la patte est relevée, et ne dessine pas lorsqu’elle est abaissée.