Études et choix techniques
Ici se trouve, les choix qui ont étés effectués pour faire avancer le projet.
Logiciels utilisés :
Nous avons utilisé Github Desktop pour faciliter l’utilisation,la gestion de codes et du site internet. Teams pour communiquer facilement. L’environement de développement VS CODE pour le programme Arduino et PYZO pour le programme python. Le logiciel de modélisation utilisé est Onshape.
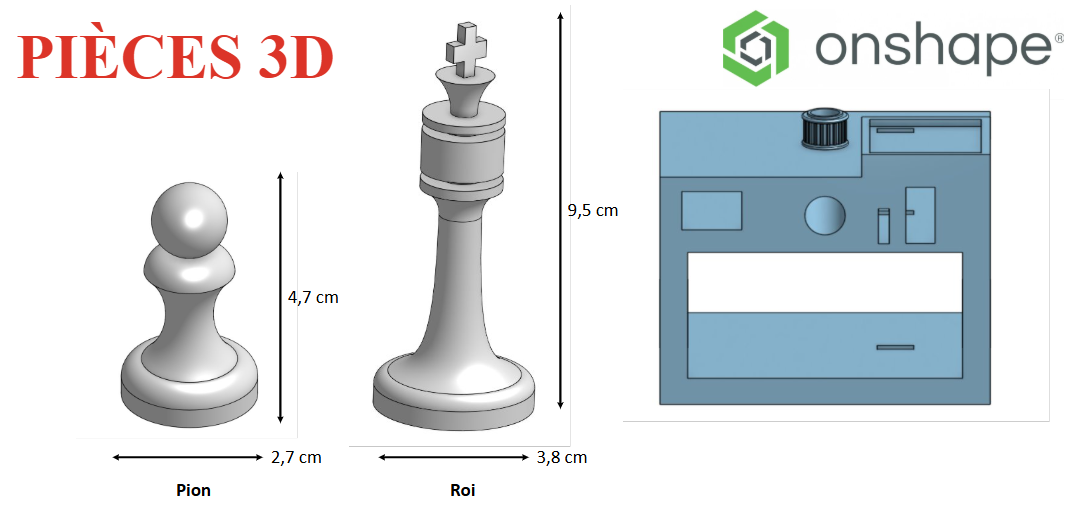
Pour adapter au mieux notre espace, on a fait imprimer en 3D chaque pièces du rail, ainsi que les pièces de jeu.
Nous avons imprimé les pièces d’échecs et les éléments du rail en 3D
Schéma du rail 2D se situant sous le plateau de jeu :
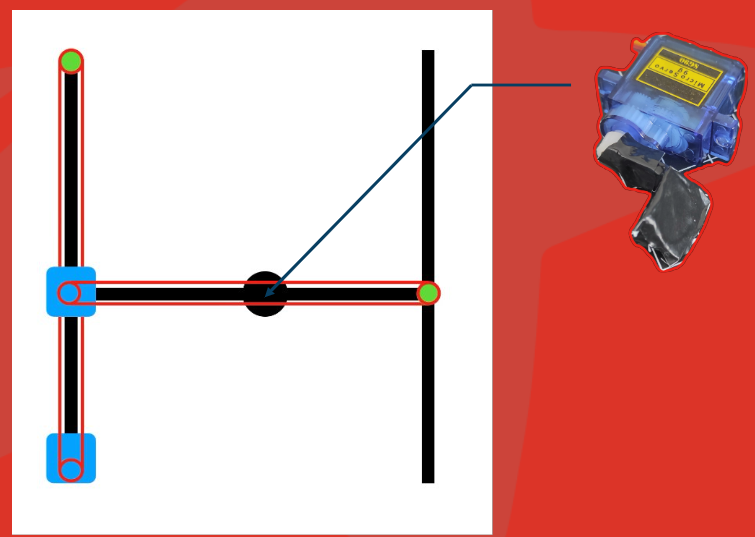
Chaque barre noire est une tige en aluminium, les carrés bleus des moteurs pas-à-pas et les traits rouges les courroies. Au centre, on peut voir le chariot central qui transporte le servomoteur (situé à droite de l’image) qui lui élèvera une platforme magnétique pour activer l’aimantation ou l’abaissera pour désactiver l’aimantation.
Nous avons décidé de mettre en place un système de déplacement via activation ou désactivation de l’aimantation
Implentation d’aimant sous les pièces :

Chaque pièce du jeu a dû être dessiné pour y intégrer un espace pour l’aimant. Pour qu’elles soient reconnaissables au premier coup d’œil, les pièces ont des formes plutôt classiques, bien que la reine et le roi aient été faits pour être différenciés plus facilement. Elles ont les dimensions standards définies par la Fédération internationale des échecs.
Matériels utilisés et explications
Comme indiqué au-dessus nous avons besoin d’un servomoteur qui est contrôlé par la carte Arduino Uno en injectant un code qui contraint d’un angle indiqué ce moteur. En réalité ce moteur ne fait donc aucun tour sur lui-même mais il positionne la platforme aimanté de manière précise grâce à l’affectation d’un angle qui sera déterminé par des tests. On retient 2 angles d’utilisation : Un certain angle pour l’activation et un autre certain angle pour la désactivation.
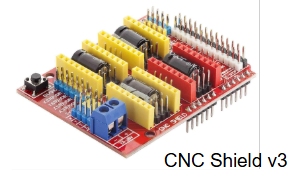
Le déplacement du rail 2D situé sous l’échiquier nécessite l’utilisation de deux moteurs pas à pas, contrôlés par une carte Arduino UNO couplée à un CNC Shield, qui permet d’adapter les tensions nécessaires au bon fonctionnement des moteurs. Des drivers sont également utilisés afin de réguler et dissiper l’énergie produite par les moteurs, tout en assurant leur protection et leur stabilité pendant les déplacements.

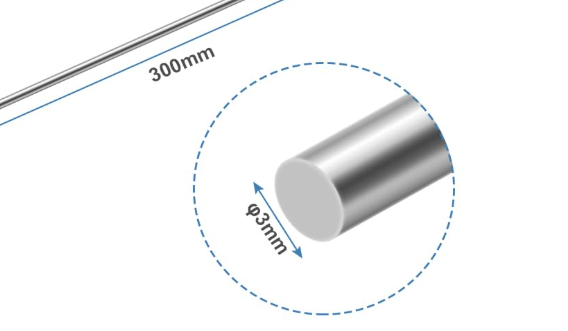
On a utilisé des tiges pour consolider notre rail et faire que l’assemblage tienne le coup tout du long lors de l’utilisation lors d’une partie. Les tiges utilisées sont en aluminium car elles sont légères et solides.
Côté informatique
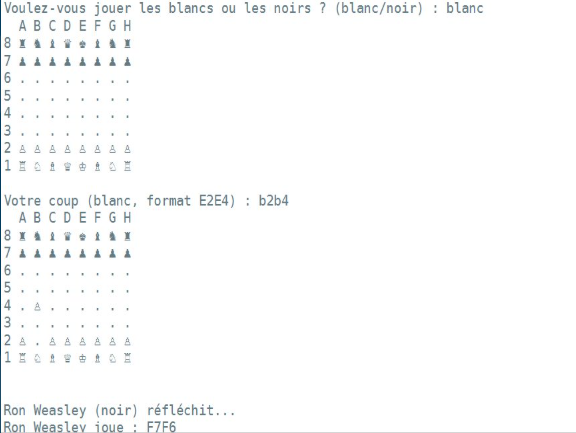
Nous avons décidé de re-programmer le jeu d’echec entièrement sous Python et ainsi ce qui nous a permis de développer une IA : Ron Weasley qui joue de la façon suivante :
- Prend un pion adverse dès que c’est possible
- Sinon, il veille à ne pas mettre en danger une de ces pièces directement au prochain coup possible de l’adversaire
Le code Python
Permet de donner une interface de jeu accessible et de visualiser l’etat du plateau numériquement. Il permet également de vérifier les coups rentrés et le bon déroulement du jeu.
Le code Arduino
Ce code veille à la rotation des moteurs et à l’activation de l’aimantation selon les instructions du code Python (programme lourd).