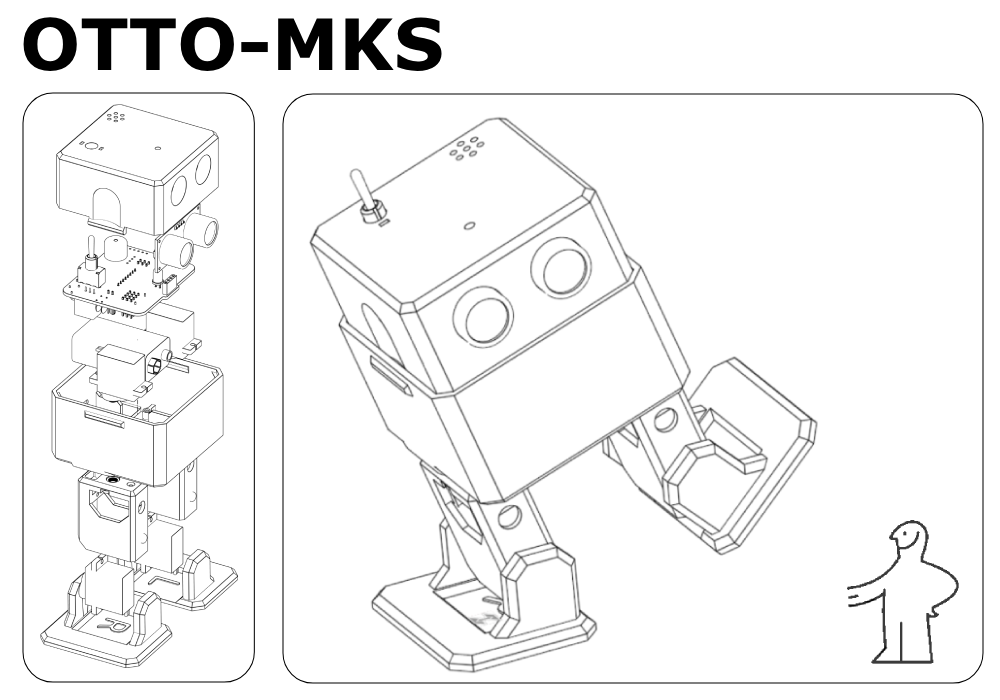
Maintenant que vos pièces sont imprimées, suivez ce guide pour assembler votre Otto-MKS !
Avant d’assembler votre robot, et pour que le montage se passe au mieux, vous devez avoir suivi l’ensemble des tutoriels précédents !
Prenez votre temps à chaque étape et vérifiez régulièrement votre assemblage, notamment concernant le type de vis à utiliser.
Matériel
Pour commencer, vérifiez que vous disposez de l’ensemble du matériel et des pièces imprimées
Étape 1 - Assemblage du corps
Insérez les servomoteurs dans la pièce Body aux emplacements prévus à cet effet.
Étape 2 - Vissage des servomoteurs
⚠️ Attention : Vérifiez le type de vis
Étape 3 - Assemblage des palonniers
Découpez deux palonniers comme indiqué, puis insérez-les dans les pièces Leg.
Enfoncez les palonniers jusqu’au fond des emplacements prévus.
Pour la prochaine étape, vous aurez besoin du code réalisé précédemment dans le tutoriel sur les servomoteurs, permettant de les positionner à 90°
Les servomoteurs sont très fragiles, évitez au maximum de forcer manuellement leur rotation, au risque d’endommager les pièces mécaniques internes !
Étape 4 - Assemblage des jambes
Branchez les deux servomoteurs sur la carte électronique et exécutez votre code de positionnement à 90°.
Insérez ensuite les jambes sur l’axe des servomoteurs, dans la position indiquée.
Débranchez les servomoteurs et vérifiez que les butées se trouvent bien à 90° de part et d’autre de la position neutre.
Étape 5 - Vissage des jambes
Vissez les jambes sur les axes des servomoteurs.
⚠️ Vérifiez le type de vis
Étape 6 - Assemblage des palonniers des pieds
Insérez les palonniers dans les pièces Left_Foot et Right_Foot jusqu’à la butée.
Étape 7 - Vissage des palonniers des pieds
Vissez fermement les palonniers.
⚠️ Vérifiez le type de vis
Pour la prochaine étape, vous aurez besoin du code réalisé précédemment dans le tutoriel sur les servomoteurs, permettant de les positionner à 90°
Étape 8 - Assemblage des servomoteurs des pieds
Branchez les deux servomoteurs sur la carte électronique et exécutez votre code de positionnement à 90°.
Insérez ensuite les servomoteurs dans les pièces Foot dans la position indiquée.
Débranchez les servomoteurs et vérifiez que les butées se trouvent bien à 90° de part et d’autre de la position neutre.
Étape 9 - Vissage des servomoteurs des pieds
Vissez l’axe des servomoteurs.
⚠️ Vérifiez le type de vis
Étape 10 - Assemblage des pieds
Insérez les pieds dans les emplacements prévus des pièces Leg.
Assurez-vous de faire passer les fils par les trous de la pièce Body.
Étape 11 - Vissage des pieds
Vissez la deuxième vis des servomoteurs.
⚠️ Vérifiez le type de vis
Étape 12 - Assemblage du capteur ultrason
Glissez le capteur dans la pièce Head selon la position et le sens indiqués.
⚠️ Attention : les grilles avant des capteurs sont très fragiles, évitez d’appuyer dessus
Étape BONUS - Pause canard
Prenez une pause pour observer le canard jaune de votre kit, si vous avez rencontré des problèmes depuis le début du montage, il saura vous écouter avec compassion !
source
Étape 13 - Préparation de la carte électronique
Dévissez et conservez la rondelle et l’écrou du bouton.
Étape 14 - Installation de la carte électronique
Insérez délicatement la carte dans la pièce Head.
Vérifiez que les broches du capteur ultrason s’insèrent correctement dans le connecteur et que le bouton est enfoncé jusqu’à la butée.
Étape 15 - Assemblage de la tête
Finalisez le montage de la tête en remettant la rondelle et en revissant l’écrou.
⚠️ Important : l’ergot de la rondelle doit s’insérer dans l’un des deux trous prévus à cet effet
Étape 16 - Installation de la batterie
Fixez la cosse 9V sur la batterie.
⚠️ Attention : la carte ne doit SURTOUT PAS être branchée à l’envers, sous peine de l’endommager
Insérez ensuite la batterie dans son emplacement, avec les câbles orientés vers le haut.
Étape 17 - Câblage
Branchez les servomoteurs sur la carte en respectant l’ordre indiqué pour éviter tout problème lors de la programmation.
⚠️ Vérifiez le bon sens des connecteurs des servomoteurs en contrôlant les couleurs (Marron sur ⏚, Rouge sur +5V, et Jaune sur le signal)
Connectez enfin la batterie sur le connecteur d’alimentation.
Utilisez la bande de velcro fournie pour organiser proprement les câbles.
Étape 18 - Assemblage final
Terminez l’assemblage en refermant la tête sur le corps.
Appuyez légèrement sur les côtés pour faciliter l’emboîtement.
⚠️ Vérifiez qu’aucun câble n’est coincé entre les deux pièces
À vous de jouer !
Félicitations ! 🎉
Votre Otto est maintenant opérationnel !
Vous pouvez désormais le programmer et le modifier pour participer, et peut-être remporter, les épreuves du tournoi, dont les règles sont disponibles ici.
Pour aller plus loin
Découvrez d'autres tutoriels en lien avec le projet