Information
N’oubliez pas de prendre des photos et de documenter chaque étape au fur et à mesure sur votre site de documentation.
Proposition de séquençage technique du projet

Roadmap technique
Cette page détaille les différentes étapes pour réaliser votre projet
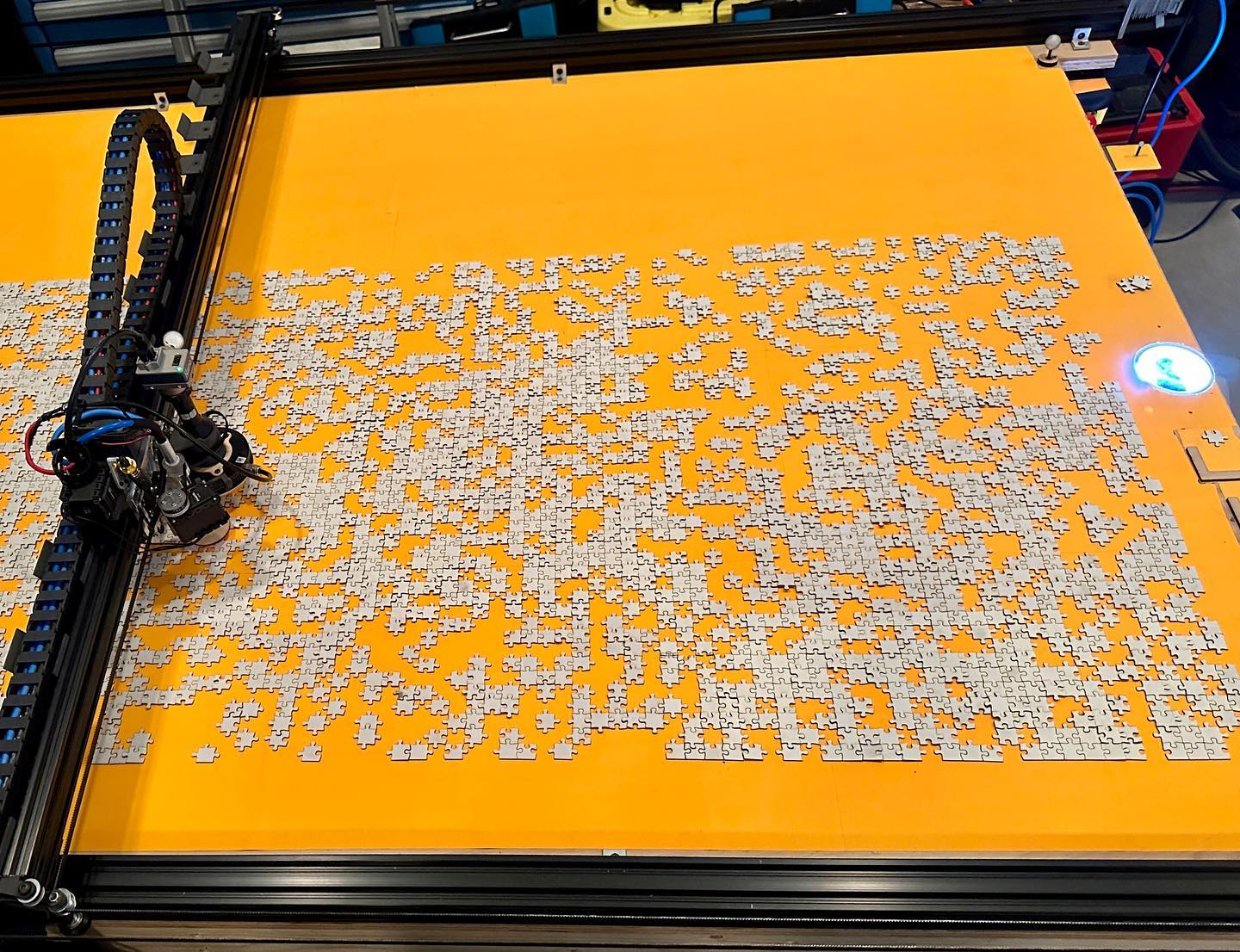
L’objectif de cette partie du projet est de concevoir un système robotique capable de percevoir, localiser, orienter et manipuler des pièces de puzzle, en s’appuyant sur une montée progressive en complexité. Plutôt que de viser immédiatement un cas réaliste et complexe, le travail proposé repose sur une démarche itérative, où chaque étape valide une brique technique essentielle du système.
La progression est volontairement découpée afin d’introduire une seule difficulté nouvelle à la fois. Chaque étape doit faire l’objet d’une validation expérimentale avant de passer à la suivante. Cette approche permet de mieux identifier les sources d’erreurs, de consolider les acquis et de garantir un système fonctionnel à tout moment.
Il est tout à fait acceptable — et parfois recommandé — de s’arrêter à un niveau intermédiaire pleinement opérationnel, à condition que celui-ci soit robuste, maîtrisé et correctement documenté. La qualité de la démarche et la compréhension du système priment sur la complexité finale.

Commencez par un puzzle très simple composé de 4 à 6 pièces carrées, sans formes complexes ni encoches.
Hypothèses :
Objectifs :
Aucune fonction de vision complexe n’est nécessaire à ce stade. Cette étape permet de vérifier que le robot sait assembler un puzzle dans des conditions idéales.

Les pièces sont toujours placées à des positions connues, mais leur orientation est désormais variable.
Hypothèses :
Objectifs :
Cette étape ajoute une difficulté ciblée sans remettre en cause la structure globale du système.

Chaque pièce est équipée d’un marqueur ArUco permettant au robot de connaître sa position et son orientation.
Hypothèses :
Objectifs :
À l’issue de cette étape, le robot sait où sont les pièces, comment elles sont orientées et peut planifier leur manipulation.

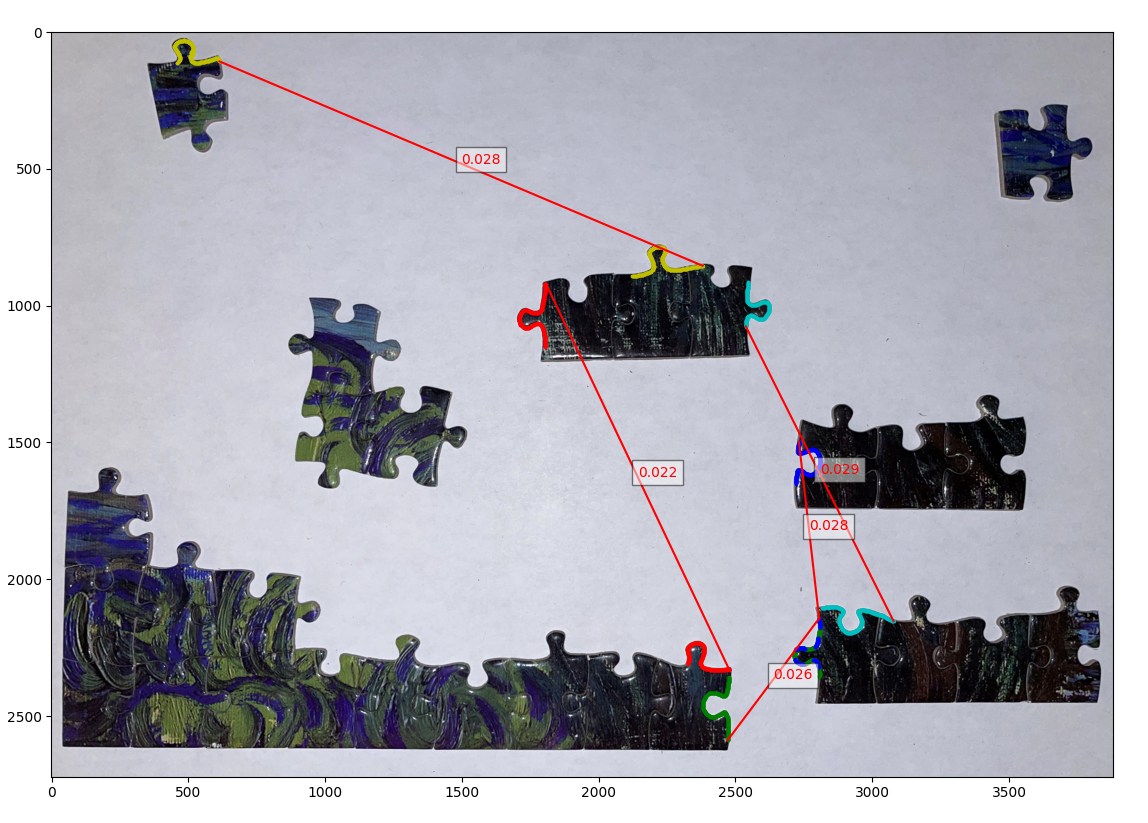
Le puzzle possède une solution connue et le robot utilise la vision pour guider l’assemblage.
Objectifs :
Cette étape vise à fiabiliser l’ensemble de la chaîne vision–manipulation dans un scénario maîtrisé.

Une fois le système fonctionnel, plusieurs évolutions sont possibles selon l’ambition du groupe :
Ces extensions permettent de tester la précision, la robustesse et les limites du système développé.
Trouvez d'autres tutoriels en lien avec le projet