Créer un support pédagogique interactif pour comprendre le principe du PID
Projet - Soft-robotics
Un seul groupe sur ce projet
Tuteur(s) - Adrien BRACQ ( 2024 )
Etudiant(s) - étudiant 1 ( 2024 ) - étudiant 2 ( 2024 ) - étudiant 3 ( 2024 ) - étudiant 4 ( 2024 )
Catégorie(s) :
Archivés
Domaine(s) :
Mécanique
Programmation
Logiciel(s) :
VsCode
FreeCAD
Fusion360
OnShape
Statut : Nouveau projet
Projet de Recherche en Soft Robotics
Présentation du Projet
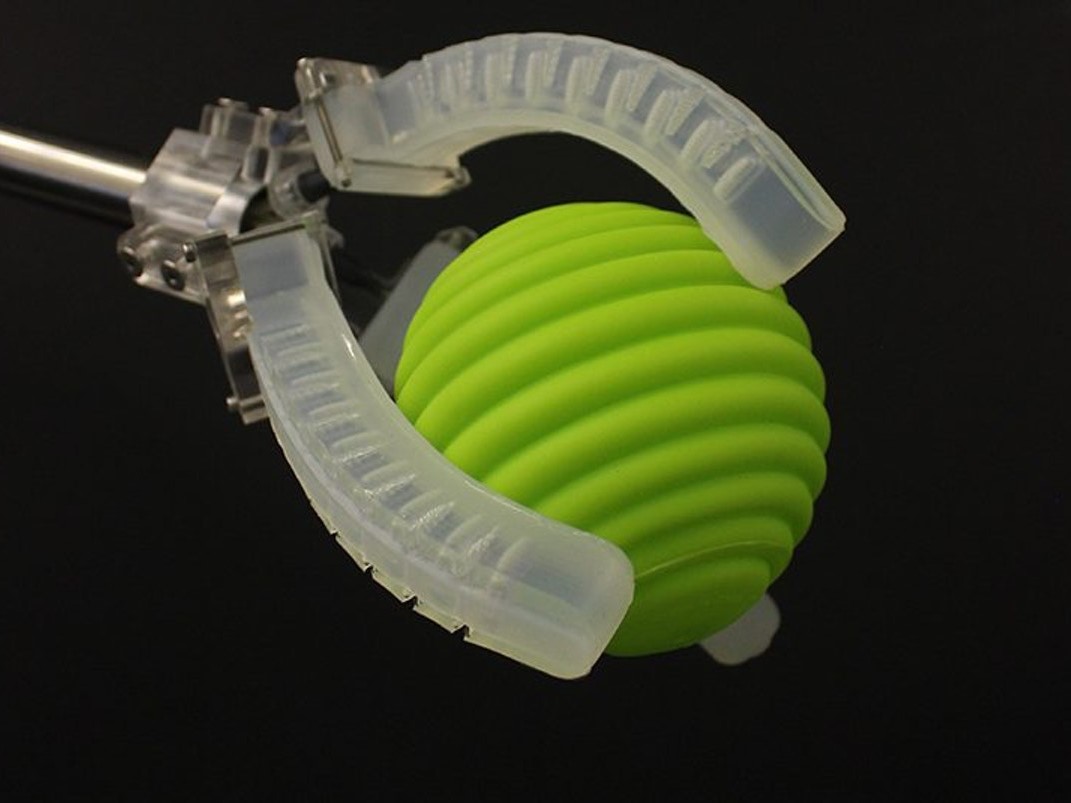
Ce projet de recherche se concentre sur les actionneurs en soft robotics, avec un accent particulier sur ceux imprimés en 3D utilisant du TPU souple. L’objectif est de tester et de documenter divers types d’actionneurs souples, y compris leur impression sur textile, afin de comprendre leurs caractéristiques, performances et applications potentielles. Ce projet offre aux étudiants l’occasion d’explorer un domaine innovant en robotique, combinant approches théoriques et expérimentales.
Objectifs du Projet
- Étudier Différents Types d’Actionneurs Souples, y compris ceux imprimés en 3D avec du TPU souple.
- Expérimenter l’Impression d’Actionneurs sur Textile pour explorer de nouvelles applications et fonctionnalités.
- Construire des Modèles d’Actionneurs et tester leur comportement en conditions réelles.
- Mener des Expériences pour évaluer les performances en termes de force, flexibilité et durabilité.
- Documenter les Résultats en détaillant les caractéristiques de chaque actionneur testé.
- Analyser les Domaines d’Application Potentiels pour chaque type d’actionneur, en considérant les industries où ils pourraient être utiles.
Valeur Pédagogique
Ce projet est idéal pour les étudiants intéressés par la robotique avancée et l’ingénierie. Il offre une expérience précieuse en recherche et développement, encourage l’analyse critique et la pensée innovante. Les étudiants auront l’opportunité de travailler en équipe sur des problèmes complexes et d’acquérir des compétences en recherche scientifique, impression 3D et design textile.
Liens et ressources
-